


他山科技成为人形机器人触觉感知引领者
他山科技自2017年起深耕触觉传感器领域,通过自研底层芯片和软硬一体方案,解决了人形机器人触觉感知的瓶颈。文章探讨了触觉技术的复杂性、公司的全栈自研策略,以及其在全球市场中的高占有率,展示了他在推动机器人感知能力方面的引领作用。


尹周平院士:人形机器人从“能动”到“能交互”需跨越三重挑战
本文基于尹周平院士的分享,深入探讨了人形机器人从‘能动’到‘能交互’的进化路径。文章揭示了机器人发展的三个关键阶段:运动拟人、操作类人和交互如人,重点分析了触觉传感器在灵巧操作中的核心作用,以及情感计算与意图理解在自然交互中的前沿趋势。这不仅是一份技术图谱,也为产业提供了清晰的进化路线图和未来应用展望。
五八智能出海提速:天狼Q25一带一路版发布
五八智能发布天狼Q25的“一带一路”版本,针对中东、中亚等海外市场的高温、多沙尘环境进行专项优化。文章分析了该版本在环境适应性、性能稳定性和通信冗余方面的改进,强调其务实设计如何提升机器人在极端条件下的可靠性,为中国智能设备出海提供关键支持。

电机销量猛增246%!步科股份要包揽人形机器人关节?
步科股份无框力矩电机销量同比增长超246%,作为人形机器人关节核心部件供应商,公司已获得多家头部客户认可。文章深入剖析步科在无框力矩电机、空心杯电机、氮化镓伺服驱动器等核心部件的技术布局,以及常州智能制造基地的产能规划,展现其从部件到模组的全栈能力,为观察人形机器人产业链上游供应商的真实状态提供重要切片。
南洋理工、伯克利、斯坦福、ETH联合发表机器人世界模型综述
这篇综述论文由南洋理工、伯克利、斯坦福等顶尖机构联合发表,系统梳理了机器人学习中世界模型的研究现状。文章定义了世界模型在机器人语境下的核心能力,包括预见性、规划和数据增强,并探讨了其与策略耦合的五种范式,如解耦式管道和统一VLA模型。同时,分析了世界模型作为仿真器的双重角色,为机器人学习领域提供了全面视角和未来挑战。

Genesis AI发布GENE-26.5机器人基础模型,实现从烹饪到钢琴等只有人手才能完成的任务
Genesis AI发布了GENE-26.5机器人基础模型,该模型通过拟人化的机械手和数据采集手套,使机器人能够以人类级别的灵巧度执行复杂任务,如烹饪和钢琴演奏。文章介绍了模型的技术逻辑、数据策略和仿真系统,展示了机器人技术在缩小'具身性差距'方面的重要进展,为构建通用机器人奠定基础。

斯坦福团队利用弹性弯杆创造具有两千万种变形的思考型机器人骨架
斯坦福大学团队开发了‘弹性杆折纸’(RodOri)平台,利用预弯曲弹性杆构建可重构机器人骨架。该系统能在两千万种形态间自由切换,通过手动扭转调整力学性能,如刚度从软到硬,无需电机或芯片。这一创新为软体机器人、自适应装备和可编程超材料领域提供了新突破,实现了更多稳定形态和更自由调控。
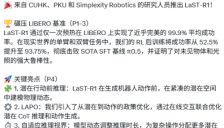
北京大学仉尚航团队提出LaST-R1框架,机器人首次实现“边想边做”
北京大学仉尚航团队提出LaST-R1框架,针对当前视觉-语言-动作模型缺乏物理推理能力、适应性差的问题,通过将潜在空间中的物理推理嵌入强化学习优化回路,使机器人能够实现‘边想边做’。该框架同步优化推理表示和动作策略,显著提升机器人在真实环境中的适应性和任务成功率,推动机器人智能向更自主、灵活的方向发展。
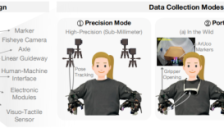
港大与复旦联手推出TAMEn实现亚毫米触觉操控与100%复现解决双手机器人数据采集难题
香港大学与复旦大学等机构联合推出TAMEn触觉感知操纵引擎,针对双手机器人在柔性物体抓取、精密装配等高接触任务中的数据采集难题。TAMEn通过视觉-触觉闭环系统,实现亚毫米级精度和100%数据复现率,支持双模式硬件切换和在线可行性校验,有效解决了精度与便携性矛盾、硬件适配难、数据清洗耗时等问题,为机器人策略学习提供高质量数据。
苏黎世联邦理工学院让机器人学会"想象":零样本部署四足和人形机器人
ETH苏黎世研究团队开发了RWM(Robotic World Model)框架,通过神经网络模拟器让机器人在虚拟环境中“想象”动作,实现零样本部署到真实硬件。该框架采用双重自回归机制解决误差累积问题,使用GRU架构提高预测效率,并结合特权信息训练策略。实验表明,ANYmal D四足机器人和Unitree G1人形机器人能精确执行速度跟踪任务,无需在线微调,显著提升了机器人学习的样本效率和部署安全性。