阿里AI建模赋能高德地图 餐饮补贴战直指美团
阿里巴巴正通过高德地图推出AI 3D建模技术,帮助餐饮商家低成本生成店铺3D展示,并计划投入数十亿元补贴,以AI赋能和资本驱动挑战美团在本地生活市场的主导地位。文章分析了该战略对行业竞争格局、商家数字化及监管环境的影响。


五一视界港股上市 中国首家物理AI企业领跑数字孪生赛道
五一视界作为中国首家‘物理AI’企业在港股上市,标志着数字孪生产业进入规模化商业变现新阶段。公司以‘克隆地球’为愿景,通过高精度数字孪生技术动态复刻现实世界,为智慧城市、能源、工业等领域提供智能决策支持,领跑万亿赛道。

腾讯元宝回应AI辱骂用户:模型异常输出属小概率事件
腾讯元宝针对用户反馈的AI辱骂事件做出回应,称经过日志核查确认属于小概率的模型异常输出,与用户操作和人工回复无关。官方表示已启动内部排查和优化,致力于改进模型表现,避免类似情况再次发生。

ChatGPT接入主流应用 变身万能生活管家
OpenAI推出ChatGPT App集成功能,支持Booking.com、Canva、Uber等12款主流应用,用户可通过自然语言指令直接完成订酒店、点外卖、做PPT等真实操作,实现从对话到执行的闭环。文章介绍了具体应用场景、操作方式及隐私控制,并探讨了AI助手向“万能生活管家”的转变趋势。

DoorDash司机因使用AI伪造送餐照片被永久封号 平台确认首例AI欺诈案 用户晒对比图引发热议
DoorDash近日确认永久封禁一名司机账户,因其使用AI生成图像伪造配送完成证明,这是全球主流本地服务平台公开承认的首起AI驱动的配送欺诈事件。事件曝光后引发公众对生成式AI滥用边界的广泛担忧,平台已采取全额退款和升级风控措施。文章探讨了AI伪造内容如何侵蚀数字服务信任基石,并展望未来可能的多重验证机制。

中国食堂智能化升级引热议
文章探讨了AI和机器人技术如何在中国学校食堂引发一场静默的餐饮革命。从上海高校的全自动制面系统到北京中小学的智能炒锅,技术不仅解决了传统食堂排队时间长、打菜分量不均等问题,还通过精准配比、数据分析和全流程监控,提升了食品安全与营养管理效率。这场变革正重新定义校园用餐体验,让餐饮服务从‘吃饱’迈向‘吃好’。


创新扫地机器人实现飞行功能
文章介绍了CES 2026展会上MOVA公司推出的创新产品——赋予扫地机器人飞行能力的Pilot 70模组。该模组通过无人机与扫地机集成,旨在解决多楼层住宅的清洁痛点,实现从二维到三维空间的自动化清洁。文章探讨了这一设计的模块化优势、技术融合潜力以及对智能家居行业未来发展的启示。

Grab押注AI机器人未来
文章分析了Grab收购推行科技的战略意义,指出这是东南亚科技巨头在具身智能和末端配送自动化领域的关键布局。文章探讨了收购背后的行业趋势,包括人力成本上升、平台对机器人作为基础设施的需求,以及Grab寻求第二增长曲线的动机。同时,文章也介绍了推行科技在AI机器人领域的技术实力和团队背景,揭示了这场收购对未来机器人商业化落地的影响。
北京幻方发布40B参数大模型 开源引发AI领域关注
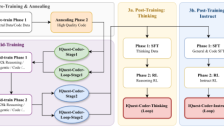
九坤投资开源IQuest-Coder-V1系列大模型,40B参数版本在SWE-Bench Verified榜单取得81.4%高分,超越Claude Opus-4.5等知名模型。该系列提供7B、14B、40B三个版本,支持代码生成与理解任务,并创新采用代码流多阶段训练策略,提升逻辑动态捕捉能力。模型可在单张3090/4090显卡运行,大幅降低使用门槛,展现了中国AI领域的重要进展。

Google首席工程师公开认可Claude Code,1小时解决团队一年难题,称AI编程发展超出预期
Google首席工程师公开称赞Claude Code仅用1小时解决团队一年难题,展示了AI编程在复杂系统设计上的惊人进化。文章探讨了AI从代码补全到系统构建的范式革命,及其对开发者和行业竞争格局的深远影响。