



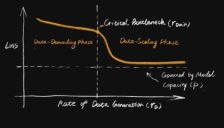
具身智能开源造梦工厂 推动AI定义机器人数据平权
跨维智能开源EmbodiChain工具链,通过100%合成数据训练机器人并实现真实世界零样本部署,标志着具身智能领域的'ImageNet时刻'到来。该技术突破传统机器人训练的数据稀缺、成本高昂等困境,基于生成式仿真和物理模型构建虚拟世界,推动数据平权,降低行业门槛。

华为哈勃投资加持,半年融资三连跳,这家公司如何成为世界模型黑马
文章介绍了流形空间这家初创公司在成立仅半年内完成三轮融资的惊人成就,背后是其创始人武伟博士带领团队研发的WorldScape世界模型技术。该技术通过物理推演能力重新定义具身智能,获得华为哈勃等顶级资本押注,展现了在机器人、自动驾驶等领域的巨大潜力。

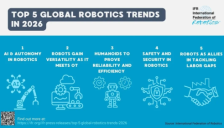
IFR发布2026年机器人产业五大趋势
国际机器人联合会(IFR)最新报告揭示了2026年全球机器人产业的五大核心趋势:AI全面赋能提升机器人自主性、IT/OT深度融合解锁通用潜能、人形机器人步入实战考验可靠与效率、安全防护成为产业发展重中之重。报告指出,AI与机器人的深度结合正成为重构全球生产力的核心引擎,技术创新与场景拓展将共同推动产业持续增长。

哈工大微型机器人登顶IEEE 节能杂技双突破
哈尔滨工业大学科研团队在国际顶级期刊上发表论文,提出一种名为FRDP的新型空间站自由飞行机器人。这款机器人重量仅600克,采用创新的双模态推进系统,既能高效节能巡航,又能灵活机动执行高精度任务。其设计灵感源自直升机矢量推进技术,通过双矢量推进模块实现六自由度精确控制,为空间站狭小环境下的自主作业提供了高效解决方案。

中科院沈阳自动化研究所等发布类生命机器人最新综述
本文介绍了类生命机器人这一前沿科技领域,探讨了由活体细胞与人工材料结合构建的‘半生命体’机器人如何融合生物高效能量利用与机器精准控制。文章基于中科院沈阳自动化研究所等团队的最新综述,系统解析了类生命机器人的进化历程、核心活体材料(如心肌细胞、骨骼肌细胞)和人工支撑材料(如聚合物、水凝胶),并展望了其在智能控制、医疗和环境监测等领域的未来发展方向。

北大与BIGAI联合推出TacThru传感器 触觉视觉双感知提升操作精度
北京大学与北京通用人工智能研究院联合推出TacThru传感器,通过透明弹性体材质、关键线标记和高效追踪算法,实现了触觉与视觉的同步感知。结合TacThru-UMI模仿学习框架,该系统在拾取、分拣、插入等机器人操作任务中展现出85.5%的平均成功率,显著超越传统方案,为精细操作提供了突破性解决方案。

AI助力仿生人脸机器人学会开口说话 网红博主“U航”作品登顶国际期刊封面
胡宇航博士团队研发的仿生人脸机器人Emo登上《Science Robotics》封面,通过Facial Action Transformer自监督学习框架和10自由度柔性机械结构,实现了机器人唇部运动对任意语音的实时生成,解决了人形机器人说话时表情僵硬的难题。

开普勒全球首例人机协作高空焊接震撼亮相
开普勒K2大黄蜂人形机器人成功完成国内首例“人机协作”高空焊接作业,通过沉浸式全身遥操系统实现毫米级精度同步操作。操作员在地面安全操控,机器人则在高空稳定执行8小时连续焊接任务,兼具强负载、长续航与自主进化能力,为工业高危场景提供了安全高效的解决方案。

全球首个视频转3D具身数据集开源 动捕遥操或成过去
清华大学与枢途科技联合推出RoboWheel数据引擎,可将普通单目相机拍摄的人类手-物交互视频转化为适用于多种机器人的训练数据,并开源大规模数据集HORA。这一突破有望解决机器人学习领域的'数据荒'问题,降低对昂贵动捕设备的依赖,推动具身智能发展。


